SPI
Introduction
The Omega2 has a built-in hardware SPI controller allowing it to communicate with SPI-enabled peripherals. It offers 2 Chip Selects. However, the internal flash storage uses Chip Select 0, so only Chip Select 1 is free for external devices.
Context
The Serial Peripheral Interface (SPI) is a four-wire synchronous communication protocol, largely used to connect microprocessors or microcontrollers to sensors, memory, and other peripherals.
| SPI Signal | Meaning |
|---|---|
| SCK | System Clock |
| MOSI | Master Out, Slave In – Data sent from the Master to the Slave |
| MISO | Master In, Slave Out – Data sent from the Slave to the Master |
| CS/SS | Chip Select/Slave Select |
SPI is a synchronous data bus, meaning that one of the lines is a clock, used to synchronize the bits being sent on the data lines.
The protocol is based on the Master-Worker architecture.
- The Master will generate the System Clock and the Chip Select signals.
- Each worker requires its own Chip Select connection to the Master.
Hardware
The Omega2 has one hardware SPI interface available:
- The interface supports half-duplex transmissions and can operate in host-mode only.
- The maximum SPI clock frequency is 40 MHz.
- The flash storage occupies SPI Chip Select 0 and cannot be used; external devices can be connected to SPI Chip Select 1.
- External devices connected to the SPI bus can affect the boot sequence under certain conditions. (Refer to special pins - SPI pins for details.)
The Omega2 does not support full-duplex SPI transmissions. This is due to a hardware bug in the underlying MT7688 SoC used in the Omega2.
For use cases where full-duplex SPI is a requirement, consider using a software-based SPI bus.
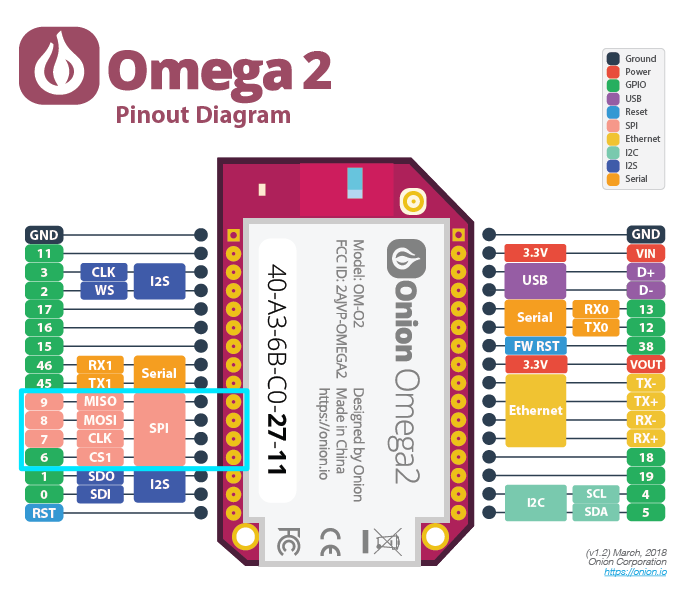
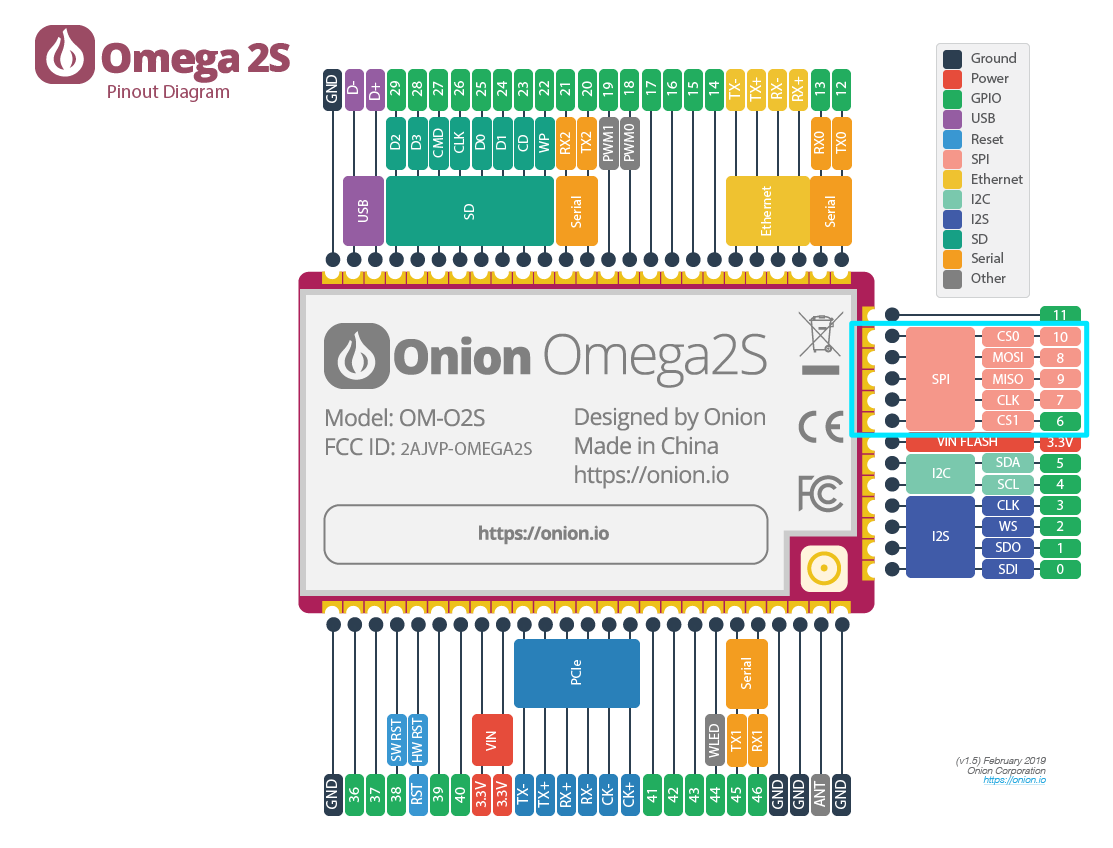
The SPI and CS1 pins are highlighted on the Omega2/2S diagrams below.
- Omega2
- Omega2S
Software-Based SPI Bus
In addition to the built-in hardware SPI bus, the Omega2 also supports software-based SPI bus implementations. This allows users to create additional SPI buses or use non-standard GPIOs for SPI communication, which is useful when:
- More than one SPI device needs to be connected
- Specific GPIOs need to be used for SPI communication
- Full-duplex SPI transactions are required (not supported on the Omega2’s hardware SPI bus)
How Software SPI Works
Unlike hardware SPI, which uses a dedicated controller to handle communication, software SPI "bit-bangs" GPIOs (manually toggling them on and off in software). This approach provides flexibility but is significantly slower and increases CPU load:
| Feature | Hardware SPI (CS1) | Software SPI |
|---|---|---|
| Speed | Up to 40MHz (fast) | Up to 1.4MHz - Slower, best for low-data applications |
| Full-Duplex Support | ❌ No on Omega2 | ✅ Yes |
| SPI Configuration | Limited; CS0 is reserved for flash | Flexible; can be configured as needed |
| GPIO Flexibility | Fixed to SPI pins | Any GPIOs can be used |
| System Load | Low (uses dedicated SPI controller) | Higher (CPU handles SPI signals) |
Enabling a Software SPI Bus
A software SPI bus can be enabled on the Omega2 by installing a Device Tree Overlay package. This allows developers to define which GPIOs should function as SPI signals when creating the Device Tree Overlay package.
For installation instructions and configuration details, see the Software SPI Bus article in the Device Tree Overlay chapter.
Software
The Omega2 hardware SPI interface is available at /dev/spidev0.1.
spidev0is the Omega2's SPI bus number.- 1 indicates the device ID, which corresponds to the worker connected to the Omega2's CS1 pin.
Interacting with the SPI bus
The following features are available on the SPI bus.
Python
Onion recommends using the python3-spidev Python module for SPI communication.
The python3-spidev module provides a series of functions that implement SPI communication through the Linux device interface. It also provides an Omega2-specific xfer3 function that implements a half-duplex write-then-read SPI transmission.
For installation and usage instructions see: https://github.com/OnionIoT/python-spidev#python-spidev.
Follow along with the Using SPI with Python guide to quickly get started using the Python spidev module to communicate with SPI devices on the Omega2.